These notes were written nearly 30 years ago. They were not meant for publication,
but are put on this website because David Kendall mentions them in [Ref. 2].
They provide an alternative derivation of Kendall’s formula for the shape density
of a random triangle formed by 3 points with independent uniform distributions inside a circle.
MB, May 2013
Let K be a bounded measurable set in R2 with |K|>0. Let three
distinguishable points A,B,C have independent uniform distributions in K. We
describe a method for finding the shape distribution of triangle ABC, where
following Kendall [Ref. 1] the shape is identified with a point σ on
S2(½) (surface of the 3-dimensional sphere of radius ½). We use
spherical coordinates θ (co-latitude) and φ (longitude) on
S2(½) identical with those on page 97 of [Ref. 1]. The total measure of
S2(½) is taken to be 1, so that
Suppose first that A,B,C have independent identical circular gaussian
distributions in R2, say
| prob(x,y)=λ exp(−λπ(x2+y2)) dx dy, |
|
(2) |
where the origin 0 has any convenient location w.r.t. K. Since K is
bounded, the induced distribution over K will tend uniformly to the uniform
distribution as λ→0. The required shape distribution over K
can therefore be obtained as the limit of the shape distribution induced by (2).
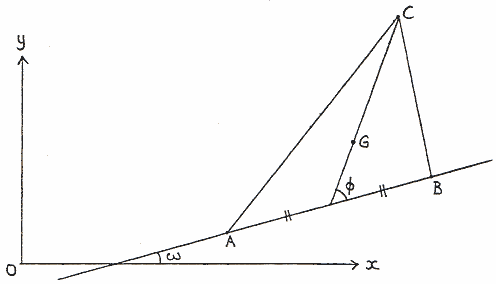
The positions of A,B,C are determined by the six coordinates xA,yA,
etc, or alternatively by the following:
(a) the shape σ of triangle ABC;
(b) the coordinates (xG,yG) of the centroid G;
(c) the size g defined by
(d) the orientation ω measured w.r.t. any convenient origin.
We use the notation of Fig. 1. As shown in [Ref. 1],
or on this website,
the position of the shape ABC on S2(½) (the “spherical blackboard”) is given by
-
longitude = φ (with φ<0 if A,B,C run clockwise);
-
co-latitude = θ, where
| |GC|:|AB|=sin(θ/2):√3cos(θ/2) . |
|
(4) |
We next find the joint p.d.f. of σ,G,g,ω. It follows from (3) and (4) that
| xA=xG− |
1 |
g sin(θ/2) cos(φ+ω) |
− |
1 |
g cos(θ/2) cosω |
| √6 |
√2 |
| yA=yG− |
1 |
g sin(θ/2) sin(φ+ω) |
− |
1 |
g cos(θ/2) sinω |
| √6 |
√2 |
| xB=xG− |
1 |
g sin(θ/2) cos(φ+ω) |
+ |
1 |
g cos(θ/2) cosω |
| √6 |
√2 |
| yB=yG− |
1 |
g sin(θ/2) sin(φ+ω) |
+ |
1 |
g cos(θ/2) sinω |
| √6 |
√2 |
| xC=xG− |
2 |
g sin(θ/2) cos(φ+ω) |
| √6 |
| yC=yG− |
2 |
g sin(θ/2) sin(φ+ω) |
| √6 |
|
(5) |
and from (3) that
| (xA2+yA2)+(xB2+yB2)+(xC2+yC2)=3xG2+3yG2+g2 . |
|
(6) |
The Jacobian of (5) turns out to have absolute value
| | |
∂(xA,yA,xB,yB,xC,yC) |
| |
= |
3 |
g3 sinθ , |
| ∂(xG,yG,g,θ,φ,ω) |
4 |
|
(7) |
so from (1) and (6) the required p.d.f. is
| prob(σ,G,g,ω)=3πλ3g3 exp(−πλ(3xG2+3yG2+g2)) dσ dG dg dω. |
|
(8) |
Here the
function on the RHS
is independent of ω and σ.
This shows that the orientation ω is uniformly distributed, as expected,
and also that the circular gaussian induces a uniform distribution
of the shape σ on S2(½), as already shown by Kendall in [Ref. 1].
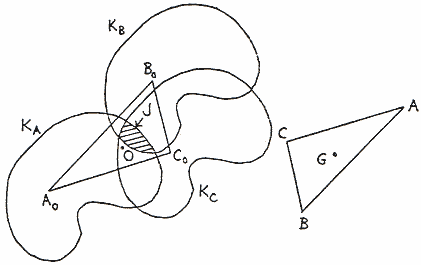
Now consider some fixed shape, size and orientation σ,g,ω of
ABC. Conditionally on these, the centroid G ranges over R2 with the
circular gaussian distribution implied by (8).
We need the probability that all three points A,B,C then fall inside K.
Define points A0,B0,C0 such that
OA0 = AG, etc.
Then A0B0C0 is a fixed
triangle congruent to ABC and rotated through π w.r.t. ABC (Fig. 2).
Let KA,KB,KC be the sets obtained by translating K through the vectors
OA0,
OB0,
OC0,
and define
Then clearly A,B,C, all fall in K if and only if G falls
in J. Since K is measurable, so is J. Now keep σ fixed and allow
g and ω to vary. Then from (8) the probability that A,B,C all fall
in K is
| dσ |
∫ |
∞ |
∫ |
2π |
3πλ3g3exp(−πλg2)(1+O(λ)) |J (σ,g,ω)| dg dω. |
| g=0 |
ω=0 |
|
(10) |
Since K is bounded there is some g0>0, independent of σ and
ω, such that |J (σ,g,ω)|=0 whenever g>g0 (because
ABC is then too large to fit inside K in any position). Hence the
exponential in (10) can be absorbed into the term 1+O(λ), and that
term can then be taken outside the integral since O(λ)→0
uniformly over all ω and g≤g0. The overall probability that
A,B,C all fall in K is
Dividing (10) by (11) and letting λ→0 we get the desired
p.d.f.
| prob(σ)=3π|K|−3dσ |
∫ |
∞ |
∫ |
2π |
g3 |J (σ,g,ω)| dg dω. |
| g=0 |
ω=0 |
|
(12) |
Recall that in Fig. 2 the size of A0B0C0 is the variable g while
KA,KB,KC are congruent to K. It may be more convenient to apply the
dilatation ƒ=g−1 to Fig. 2 so that A0B0C0 has
size 1 while KA,KB,KC undergo equal dilatations ƒ about
A0,B0,C0. Define
Then
| |J (σ,g,ω)|=ƒ−2|I (σ,ƒ,ω)| |
|
(14) |
and (12) can be rewritten as
| prob(σ)=3π|K|−3dσ |
∫ |
∞ |
∫ |
2π |
ƒ−7 |I (σ,ƒ,ω)| dƒ dω, |
| ƒ=0 |
ω=0 |
|
(15) |
where the integrand vanishes for all ƒ<g0−1.
If K is star-shaped a further transformation is possible. Take O to be one of
the points from which the whole boundary of K is visible. For any P∈R2
define
| ƒ*=ƒ*(P,ω)=inf{ƒ|P∈I (σ,ƒ,ω)} . |
|
(16) |
Then P∈I (σ,ƒ,ω) for all ƒ>ƒ* and the contribution
to (15) for a given P and ω is
| dP dω |
∫ |
∞ |
ƒ−7dƒ= |
1 |
ƒ*−6dP dω. |
| ƒ* |
6 |
|
(17) |
Hence (15) can be rewritten for star-shaped K as
| prob(σ)= |
π |
|K|−3dσ |
∫ |
|
∫ |
2π |
ƒ*(P,ω)−6 dP dω . |
| 2 |
P∈R2 |
ω=0 |
|
(18) |
If one were interested in some statistic other than shape, e.g. the minimum
width of triangle ABC as a criterion for approximate alinement, one could
perhaps apply a similar method with integration over a suitable combination of
σ,g,ω. This has not yet been tried.
Applications
Since triangle A0B0C0 has the same shape as ABC we can and will drop the
suffix 0 from now on. As an external check on the method we calculate the shape
distribution when K is a circular
disk; this has already been done by Kendall [Ref. 2]. Let K have
radius 1 and centre at O. The intersection J, when non-empty, is
bounded by three circular arcs, and the expression for | J | is complicated. It
is easier to use formula (18), where now f*(P,ω) is independent of ω
and equals the distance from P to the furthest vertex of ABC.
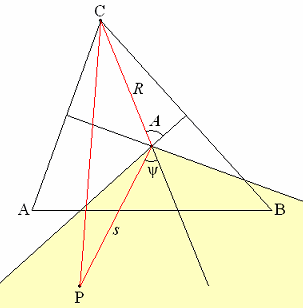
Suppose first that A,B,C are not collinear. The set of P for which C
(say) is the furthest vertex forms an infinite wedge W (Fig. 3, shaded) bounded by the
perpendicular bisectors of CA and CB.
The function f*(P,ω) in (18) is now |CP|.
Fig. 3 shows that
| ∫ |
|
|CP|−6 dP |
= |
∫ |
A |
∫ |
∞ |
s ds dψ |
. |
| W |
ψ=−B |
s=0 |
(s2+2Rscosψ+R2)3 |
|
(19) |
We find first that
| ∫ |
∞ |
s ds |
= |
1 |
(3−3ψcotψ−sin2ψ) |
| s=0 |
(s2+2Rscosψ+R2)3 |
8R4sin4ψ |
|
(20) |
(where the RHS is O(1) for small ψ). Hence
| ∫ |
|
|CP|−6 dP |
= |
1 |
[t(A)csc4(A)+t(B)csc4(B)] , |
| W |
4R4 |
|
(21) |
where R is the circumradius of ABC, given by
| 4R2(sin2A+sin2B+sin2C)=3 , |
|
(22) |
and the function t is given by
| t(A)= |
3 |
A− |
1 |
sin2A+ |
1 |
sin4A . |
| 8 |
4 |
32 |
|
(23) |
Integration over ω contributes a factor 2π, so that (18) yields, after summing over A,B,C,
| prob(σ)= |
8 |
(∑sin2A)2 ∑t(A)csc4A dσ . |
| 9π |
|
(24) |
This formula is the same as that given by equations (20) and (21) of [Ref. 2].
It is interesting to note that the function we have called
t(A) is obtained by Kendall in a different way, namely as
When ABC degenerates into a straight line, say with C between A and B,
then the contribution from C vanishes and (18) becomes the sum of two equal
integrals over half-planes separated by the perpendicular bisector of AB. If
following [Ref. 2] we write
then we easily find
| prob(σ) = |
1 |
(1+p2+q2)2 dσ , |
| 3 |
|
(27) |
again in agreement with [Ref. 2].
| [1] |
D. G. Kendall, “Shape manifolds, procrustean metrics, and complex
projective spaces”, Bull. London Math. Soc. 16, 81–121 (1984).
|
| [2] |
D.G. Kendall, “Exact distributions for shapes of random triangles in convex sets”,
Adv. Appl. Prob. 17, 308–329 (1985).
|
|